

西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航
- 科技日报
- 2019-08-06 15:46:01

新华社西安8月5日电 (记者毛海峰 付瑞霞)随着人类对海洋资源的探索、开发和利用越发迫切,研究和发展仿生智能水下航行器成为近年来全球海洋科学领域的一大热点。日前,由西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航,标志着我国在高性能仿生智能水下航行器的研制方面迈出重要一步。
自主变形仿生柔体潜航器是科技部重点支持的研究项目,以蝠鲼为仿生原型,采用交替性滑翔与扑动的滑扑一体推进模式,在水中具有高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。
滑扑一体自主变形仿生柔体潜航器项目负责人、西北工业大学航海学院院长潘光对记者说,开展滑扑一体水下推进技术研究,使潜航器兼具水下航行器的高机动能力与水下滑翔机的长续航能力,可有效解决现阶段我国传统潜航器存在的机动性、隐蔽性和续航时间综合能力不足的问题。
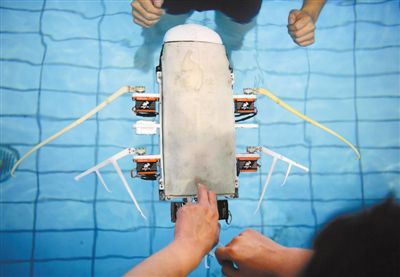
这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的滑扑运动姿态。
左图 原理验证样机在西北工业大学的游泳池内展示扑动前进(8月3日摄)。
右图 8月3日,西北工业大学研究团队的学生在调试原理验证样机的内部骨架。新华社记者 邵瑞摄
























- 数据显示:2021年全年城镇新增就业1269万人2022-01-24
- 云南安宁打破农民职业发展“天花板” 开展2022-01-24
- 2021年辽宁省粮食生产形势喜人 粮食总产量2022-01-24
- 春节期间辽宁对道路交通安全形势进行分析研2022-01-24
- 辽宁海城市确保全年签约亿元以上项目超过652022-01-24
- 辽宁盘锦公布12件民生实事 推进高质量发展2022-01-24
- “有梦 有为”周末青年志愿行动在李沧举行2022-01-24
- 听·见 | 动画师变身面塑传承人,这个802022-01-24
- 26名群众代表青岛占俩!高二学生成省政协旁2022-01-24
- 追踪丨全民接力,传来好消息!即墨失联3天2022-01-23
- 立案查处!青岛昌明置业有限公司森林公园项2022-01-23
- 半岛验房丨胶州亿阳金都馨城毛坯房墙面锈点2022-01-23
- “乐动市南”!逛街时与艺术不期而遇,“浮2022-01-23
- 人间烟火气!逛吃、选年货、置办新衣服……2022-01-23
- 浮山湾夜静悄悄2022-01-23
- 民俗大拜年,非遗专家亮绝活!2022年山东省2022-01-23
- 风雨无阻!崂山区实验学校小学部的足球队员2022-01-23
- 市北区探索服务赋能新路径 营造企业发展好2022-01-23
- 市北区聚焦中医药长远建设,产生“双驱动”2022-01-23
- 福建省一批民生项目建设取得显著成效2022-01-23
- 福建省十三届人大六次会议在福州开幕2022-01-23
- 去年福建全省地区生产总值48810亿 今年预2022-01-23
- 福建省新型冠状病毒肺炎疫情情况2022-01-23
- 吴棉国:完善网约顺风车监管机制2022-01-23
- 爱心来接力 别样过小年!青岛市第126例、2022-01-22
- 给酒驾保驾照 让醉驾免刑责? 女子凭“运2022-01-22
- 广东海警局查获特大走私冻品案案值逾2000万2022-01-22
- 广州市消费维权服务站已超过1000个2022-01-22
- 预计今年春节期间广州外卖骑手数量平稳2022-01-22
- 广东新增本土确诊病例4例 均为珠海报告2022-01-22
相关推荐

颜小耶无糖鲜榨椰汁:我们和椰树不算竞争对手
财讯网 2022/01/21
中深花园大厦项目出租快,租金回报高,业主到底赢在了哪儿?
财讯网 2022/01/21
南沙区首届文创大赛收官 金奖得主接受专访
财讯网 2022/01/21
租金回报率持续上升,揭秘金中环国际大厦业主是如何做到的?
财讯网 2022/01/21
医疗版块股票行情触底,龙头股步入调整期
艾瑞网 2022/01/20热门资讯 日 周 总

河北华奥医院启动北京冬奥和残奥医疗保障工作
河北日报 2021/12/28
全国试点的首例门诊慢特病费用跨省直接结算在海南省实现
海南日报 2021/12/27
沈阳市构建多元课后服务活动 做好学生课业负担的“减法”健康成长的“加法”
辽宁日报 2021/12/24
广东省举办“医爱一公里”活动 为300多名困难职工提供免费健康体检
工人日报 2021/12/23
物理康复治疗是此次北京市医疗价格项目调整的重点
北京日报 2021/12/15
第三季度保险公司保险消费投诉同比增长18.35% 其中人身保险占投诉总量的58.99%
中国消费者报 2021/12/22
马航失联MH370找到了?失联乘客家属代表:都是标题党
东方网 2021/12/22
河南男子脚踏3只船哭穷骗取100多万 被骗的女子:很丑会精神PUA
东方网 2021/12/21
碳中和与绿色经济发展国际论坛举行 就如何推动国际合作等展开研讨
科技日报 2021/12/06
明确电动自行车实行登记制度 禁止在住宅内及电梯间等停放充电
羊城晚报 2021/11/29
三星正在开发新款Exynos系列SoC 支持光追及可变速率着色
超能网 2021/11/29
华硕RTX3070O8G猫头鹰版显卡评测:出厂预装超频 动漫联名颜值拉满
超能网 2021/11/29
C盘Roaming里文件能删除吗?清理C盘的时候能不能清理roaming文件夹?
太平洋电脑网 2021/11/09
猫科动物血脉压制?俄罗斯一黑猫在野外逼退棕熊
游侠网 2021/08/23
